)
The international robot competition, 2006 Eurobot, focuses this year on the game of golf. For the third time in a row, the TU Chemnitz students have faced up to the annually changing rules and got down to work with high motivation.
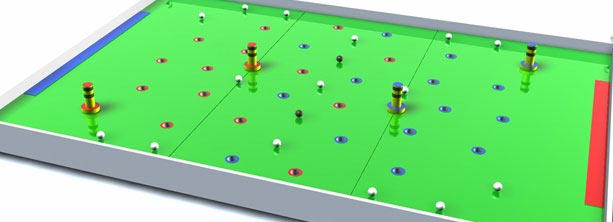
The rules of the game
14 red and 14 blue holes are distributed over a surface of 2 x 3 meters. At the start of the game, 15 white and 2 black balls are spread on the field. Four positioned totems supply the balls, each of which feeds four white and two black balls into the play.
)